AG 7: Lernfähige Robotiksysteme
- Über uns
- Arbeitsgruppen
- AG 7
Lernfähige Robotiksysteme sind physische Systeme mit eingebetteter KI, die in der realen Welt agieren. Sie unterstützen Menschen, Gesellschaft und Wirtschaft in komplexen Umgebungen – am Menschen, in sozialen Kontexten oder an gefährlichen bzw. unzugänglichen Orten. Robotiksysteme werden vielfältig eingesetzt, z. B. in der Rehabilitation (tragbare Systeme), in der Logistik, im Alltag (Putz-/Gartenroboter) oder in der maßgeschneiderten Produktion im Mittelstand und Handwerk. Angesichts demografischer Veränderungen, globaler Krisen und des Klimawandels können lernfähige Robotiksysteme helfen, Herausforderungen zu bewältigen. Die Anforderungen an Anpassungsfähigkeit und Kontrollierbarkeit variieren je nach Aufgabe.
Themen und Organisation der Arbeitsgruppe
Die Arbeitsgruppe „Lernfähige Robotiksysteme“ widmet sich dem Nutzen und dem Potenzial von lernfähigen Robotiksystemen für Wirtschaft und Gesellschaft. Sie thematisiert auch Herausforderungen und Kontrollmöglichkeiten solcher Systeme und skizziert mögliche Geschäftsmodelle.



Mitglieder der Arbeitsgruppe
- Prof. Dr.-Ing. Alin Albu-Schäffer
- Deutsches Zentrum für Luft- und Raumfahrt e.V. (DLR)
- Prof. Dr.-Ing. Tamim Asfour
- Karlsruher Institut für Technologie (KIT)
- Prof. Dr. Sven Behnke
- Rheinische Friedrich-Wilhelms-Universität Bonn
- Dipl.-Ing. Gunnar Bloss
- werk5 GmbH
- Dr.-Ing. Jeronimo Dzaack
- ATLAS ELEKTRONIK GmbH
- Dr. Thomas Egloffstein
- ICP Ingenieurgesellschaft mbH
- Dr. -Ing. Michael Gustmann
- Kerntechnische Hilfsdienst GmbH
- Prof. Dr. Verena Hafner
- Humboldt-Universität zu Berlin
- Prof. Dr. Frank Kirchner
- Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI)
- Dr. Dorothea Koert
- Technische Universität Darmstadt
- Prof. Dr. Andreas Nüchter
- Universität Würzburg
- Pierre Prasuhn
- Fraunhofer Gesellschaft (für das Lenkungskreis-Mitglied Holger Hanselka)
- Dr.-Ing. Hauke Speth
- Institut der Feuerwehr NRW
- Dr. Sirko Straube
- Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI)
- Dr.-Ing. Igor Tchouchenkov
- Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung IOSB
- Prof. Dr. Oskar von Stryk
- Technische Universität Darmstadt
- Dr. Armin Wedler
- Deutsches Zentrum für Luft- und Raumfahrt e.V. (DLR)
Von den aufgeführten Personen liegt uns ein schriftliches Einverständnis zur Veröffentlichung ihrer Daten gemäß DSGVO vor. Diese Mitgliederliste stellt einen Auszug dar und wird laufend vervollständigt.
Leitfragen der Arbeitsgruppe
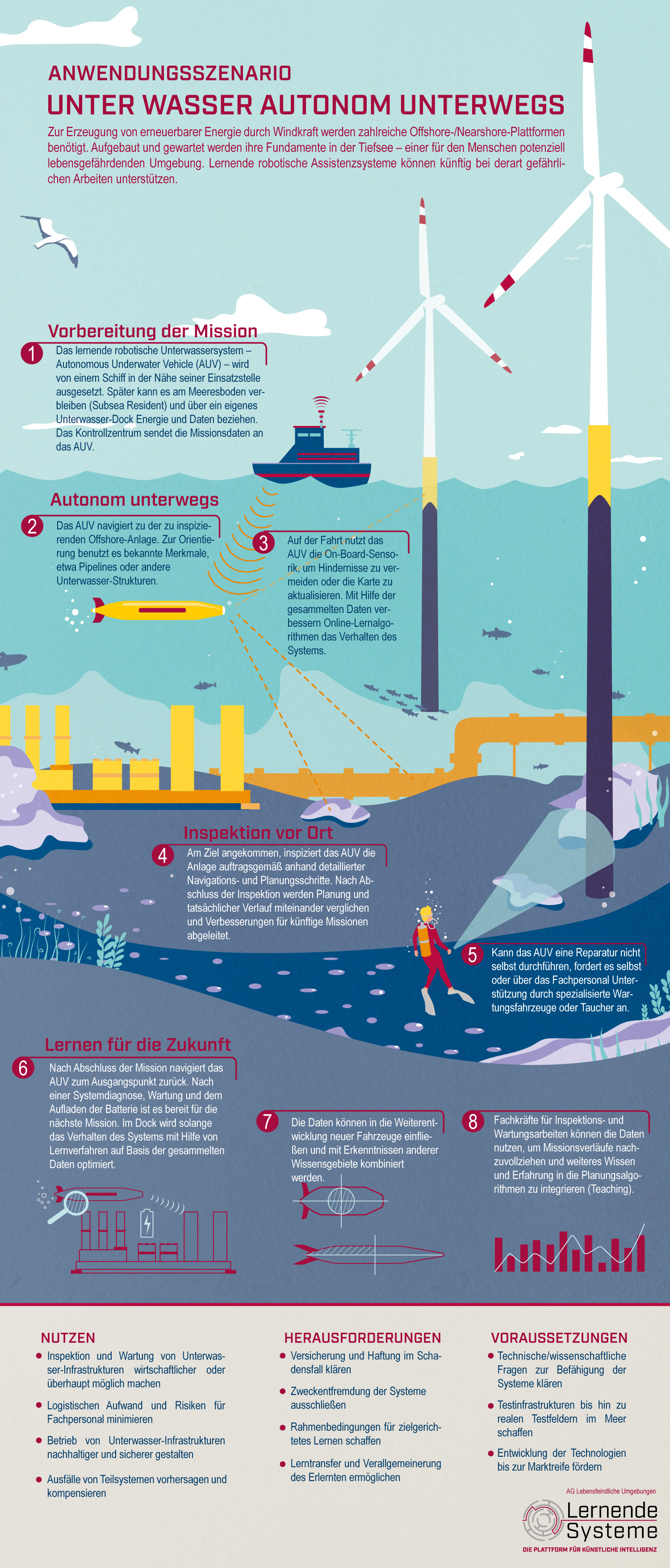
- Welchen Nutzen und welches Potenzial haben lernfähige Robotiksysteme für Wirtschaft und Gesellschaft (z.B. in der Medizintechnik, in der Produktion, im Alltag oder in lebensfeindlichen Umgebungen)?
- Wie können sich lernfähige Robotiksysteme an Erwartungen und Bedürfnisse des Menschen und an Anforderungen komplexer Umgebungen anpassen?
- Welche Geschäftsmodelle können durch die Lern- und Anpassungsfähigkeit von Robotiksystemen entstehen?
- Welche Voraussetzungen bestehen für die Forschung und Entwicklung von lernfähigen Robotiksystemen sowie für ihren Einsatz in physischen Umgebungen?
- Welche Herausforderungen entstehen durch den Einsatz lernfähiger Robotiksysteme?
- Welche Kontrollmöglichkeiten gibt es für die Lern- und Adaptionsfähigkeit von Robotiksystemen, sodass ein sicherer und verlässlicher Einsatz ermöglicht wird?
Ergebnisse und Beiträge der Arbeitsgruppe
Publikationen
Anwendungsszenarien
Expertise
Videos





- Wie KI die Robotik revolutioniert
Expertenbeitrag von Jürgen Beyerer, Fortschrittsbericht PLS/September 2025 - Selbstlernende Roboter – machen sie unsere Arbeit überflüssig?
Podcast mit Sirko Straube/August 2025 - KI und Robotik: Lernen durch Interaktion braucht funktionale Sicherheit - PLS
Expertenbeitrag von Elsa Kirchner, Elektronikpraxis/Mai 2025 - Lernfähige Roboter in sozialen Umgebungen: „Ziel muss es sein, den Demographie-bedingten Arbeitskräftemangel zu kompensieren“
3 Fragen an Jürgen Beyerer/März 2025 - Demonstration und Feedback: Roboter lernen in der Interaktion mit dem Menschen
Expertenbeitrag von Dorothea Koert, Robotik und Produktion/November 2024 - Die Zukunft ist jetzt: Wie KI und Smart Robotik Unternehmen und Gesellschaft revolutionieren
Podcast mit Elsa Kirchner, eco - Verband der Internetwirtschaft e.V./September 2024 - Vom Labor in die Pflege: Wie lernfähige Reha-Robotik den Sprung schaffen kann
Expertenbeitrag von Elsa Kirchner, e-health.com/Juli 2024 - Wie Roboter aus wenigen Daten lernen
Expertenbeitrag von Sven Behnke, Industry of Things/April 2024

{kind=link}
{kind=link}
Empfohlener redaktioneller Inhalt
An dieser Stelle finden Sie einen externen Inhalt von YouTube, der den Artikel ergänzt. Sie können ihn sich mit einem Klick anzeigen lassen und wieder ausblenden.
Empfohlener redaktioneller Inhalt
An dieser Stelle finden Sie einen externen Inhalt von YouTube, der den Artikel ergänzt. Sie können ihn sich mit einem Klick anzeigen lassen und wieder ausblenden.
Empfohlener redaktioneller Inhalt
An dieser Stelle finden Sie einen externen Inhalt von YouTube, der den Artikel ergänzt. Sie können ihn sich mit einem Klick anzeigen lassen und wieder ausblenden.
Empfohlener redaktioneller Inhalt
An dieser Stelle finden Sie einen externen Inhalt von YouTube, der den Artikel ergänzt. Sie können ihn sich mit einem Klick anzeigen lassen und wieder ausblenden.
Empfohlener redaktioneller Inhalt
An dieser Stelle finden Sie einen externen Inhalt von YouTube, der den Artikel ergänzt. Sie können ihn sich mit einem Klick anzeigen lassen und wieder ausblenden.
Koordination der Arbeitsgruppe in der Geschäftsstelle der Plattform Lernende Systeme: Dr. Maximilian Hösl