Tragbares Exoskelett für Schlaganfallpatienten
Nicht immer funktioniert das Zusammenspiel aus Geist und Körper einwandfrei – beispielsweise aufgrund neurologischer Schäden infolge einer Erkrankung oder eines Unfalls. Wie wäre es, wenn technologische Erweiterungen den Betroffenen helfen könnten, nicht funktionstüchtige Gliedmaßen zu aktivieren? Um diese Vorstellung Realität werden zu lassen, haben Wissenschaftlerinnen und Wissenschaftler am DFKI in Bremen ein KI-unterstütztes Exoskelett realisiert.
Science-Fiction-Autoren ersinnen seit Jahrzehnten technische Erweiterungen des Körpers, die die Kräfte von Menschen steigern. Mensch und Maschine sollen zu einer perfekten Einheit verschmelzen, so wie im Fall des US-amerikanischen Comic-Helden Iron Man und dessen High-Tech-Rüstung Mark. Derlei technische Fantasien waren in der realen Welt bislang schwer greifbar. Heute zeigt sich: Mit Hilfe von Künstlicher Intelligenz können Teil- und Ganzkörper-Exoskelette Menschen mit körperlicher Beeinträchtigung neue Möglichkeiten eröffnen. Rehabilitations-Robotik heißt die Fachdisziplin, die sich damit beschäftigt.
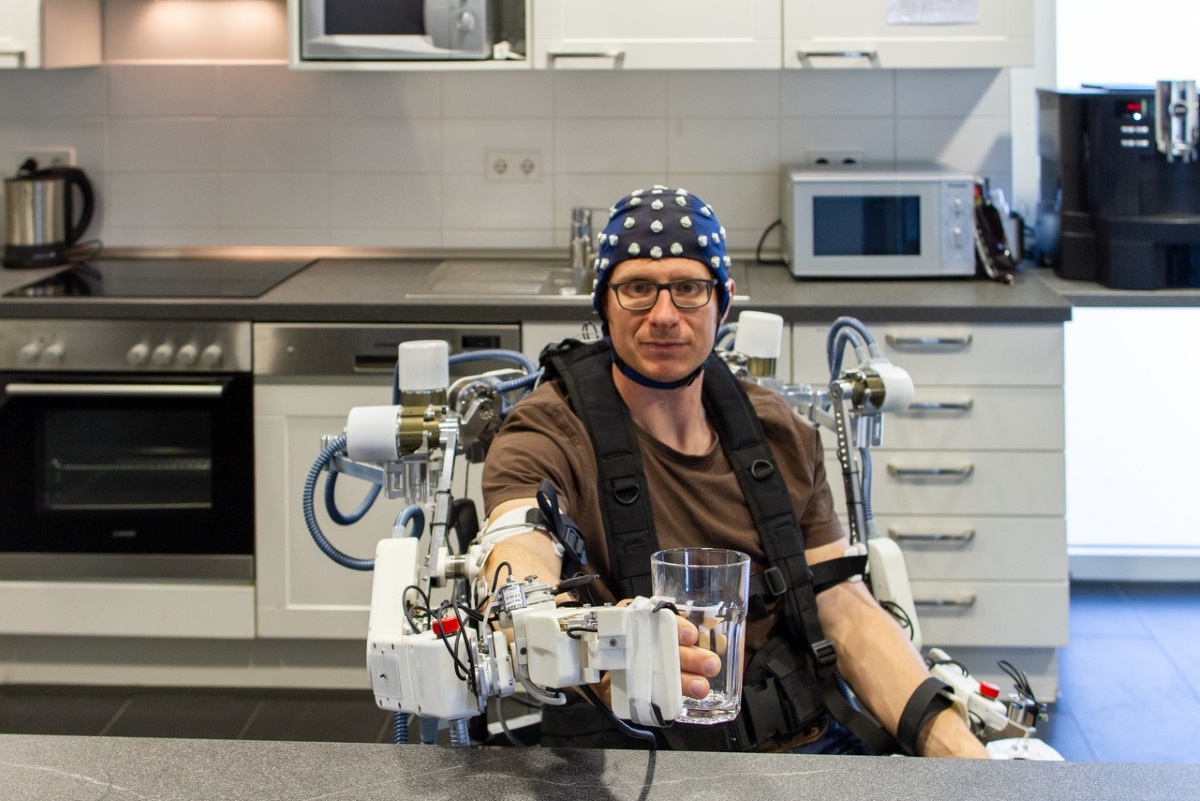
Das Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) in Bremen entwickelte in seinem Projekt Recupera REHA in den vergangenen Jahren ein mobiles Ganzköper-Exoskelett für Patientinnen und Patienten mit neurologischen Erkrankungen. Dieses bietet ihnen erweiterte und innovative Therapiemöglichkeiten. Einzelne Antriebssysteme in kleinen weißen Kästchen, sogenannte Aktuatoren, sind an einem Metallskelett befestigt. Alternativ werden diese einzelnen Module zu Greifarmen zusammengebaut und können am Rollstuhl befestigt werden, um die Mobilität der Arme zu unterstützen. Die Patienten werden je nach Handicap beim Greifen oder Gehen unterstützt und können es selbstständig anwenden, auch ohne die Unterstützung von Arzt oder Physiotherapeut.
Die technischen Herausforderungen für diese Form der robotergestützten Rehabilitation sind komplex: Um den Bewegungsraum des menschlichen Körpers weitgehend erfassen zu können, müssen neue Methoden in der Regelungstechnik und Materialherstellung entwickelt werden. Die Wissenschaftlerinnen und Wissenschaftler des DFKI verfolgen einen mechatronischen Ansatz inklusive einer Online-Auswertung von Elektroenzephalografie- und Elektromyografie (EEG- und EMG)-Signalen – also der Signalübertragung von Gehirn zur Muskulatur. Auf diese Weise kann das Computersystem jederzeit den körperlichen Zustand der Patienten abschätzen. EMG Signale ermöglichen die Abschätzung der Restaktivität, also wie viel Muskelkraft dem Patienten noch zur Verfügung steht. Auf Basis dieser Echtzeitanalyse kann die Unterstützungskraft an den Bedarf angepasst werden. Das Exoskelett kann durch das Kompensieren dieser Kräfte bis hin zum Eigengewicht des Arms den Patienten wieder in die Lage versetzen selbst mit nur geringfügiger Muskelkraft den Arm wieder eigenständig zu bewegen. Verfügt der Patient über keine Restmuskelaktivität mehr, können statt der EMG Daten auch die EEG Daten genutzt werden, um Bewegungswillen zu detektieren und auszuführen. Das so genannte Embedded Brain Reading durch Biosignal-Integration ermöglicht so eine optimale Anpassung an individuelle Bedürfnisse. Dazu nötig sind 30 elektrische Antriebe; 72 Sensoren erfassen den Bewegungsraum und die Kräfte des menschlichen Körpers.
Zusammenspiel aus Elektrotechnik und KI

In enger Zusammenarbeit mit der rehaworks GmbH in Olsberg entwickelte das DFKI Anwendungskonzepte, die sich an klassische Therapiemethoden wie Bewegungstraining oder Ergotherapie anlehnen. Genutzt werden können sie zum Beispiel zuhause mittels virtueller Realität über eine 3D-Brille.
Die Entwicklung sicherer Robotersysteme stellt die Wissenschaft vor große Herausforderungen, so auch beim Exoskelett. Die einzelnen Gelenktypen müssen sorgfältig ausgewählt, die Bauteile im Zusammenspiel mit den menschlichen Gliedmaßen entworfen werden. Darüber hinaus muss das System Bewegungs- und sensomotorische Daten live auswerten, um das Benutzerverhalten zu analysieren und die Ansteuerung individuell auf die Patienten anzupassen.
Das Exoskelett lernt aber auch, indem es Aktivitätsmodelle gesunder Probanden erstellt, die zum Vergleich herangezogen werden. Zur Analyse der EEG- und EMG-Daten nutzt das DFKI die offene Software pySPACE. Um die für die Rehabilitation erforderliche Selbstständigkeit der Patienten zu erreichen, müssen alle Berechnungen innerhalb der Exoskelett-Systemstruktur ablaufen. Integrierte Schaltkreise (FPGAs) sollen platz- und energiesparend die benötigte Leistung zur Verfügung stellen.
Von der Laboranwendung in die Praxis
Den Sprung von reinen Laboranwendungen in die Praxis haben Exoskelette bereits geschafft, sagt Elsa Kirchner, Leitende Mitarbeiterin am Robotics Innovation Center des DFKI: „In der Rehabilitation und im Industrieumfeld gibt es inzwischen mehrere Hersteller, die Modelle für unterschiedliche Anwendungsschwerpunkte anbieten. Das bedeutet, dass derzeit wichtige Erkenntnisse aus der Praxis in Verbesserungen der Systeme fließen können.“ Forschungsbedarf bestehe aber weiterhin, so Elsa Kirchner (siehe Interview). Das Ziel ist klar: Menschen mit körperlichen Einschränkungen verlorene Bewegungsmöglichkeiten zurück zu geben und das Leben zu erleichtern.
Fakten zur Anwendung
Mensch-Maschine-Interaktion und Assistenzsysteme
- Sonstiges
DFKI Standort Bremen
Universität/Forschungsinstitution
Website
"Passive Exoskelette könnten bereits massenkompatibel sein"

Dr. Elsa Kirchner, Teamleiterin am Robotics Innovation Center des DFKI und Mitglied der Plattform Lernende Systeme
Grundsätzlich haben Exoskelett-Systeme den Sprung von Laboranwendungen in die Praxis geschafft. Generell besteht aber noch großer Forschungsbedarf. So stehen technische Durchbrüche in der Miniaturisierung der Anwendungen sowie einer gesteigerten Rechenpower relativ zum Energieverbrauch noch aus. Weitere Forschungsfelder sind die Integration von Biosignalen und KI-basierter autonomer Kontexterkennung in die Regelungstechnik und die automatisierte High-Level Steuerung. Die KI-basierte Kontexterkennung würde Fragen vorhersagen, beantworten oder evaluieren, wie: Was macht der Träger gerade? Wo? Warum? Was sind seine Vorlieben? Zudem gilt es, geeignete Anwendungen für Exoskelette zu identifizieren und diese durch eine Bedarfsanalyse praxistauglich zu gestalten.
Aus meiner Sicht stimmt das Kosten-Nutzen-Verhältnis noch nicht – und das ist nicht nur monetär gemeint. Durch das Tragen eines Exoskeletts, etwa zur Kraftunterstützung im Rücken, erkaufe ich mir aktuell häufig starke Einschränkungen in anderen Bereichen. Zudem ist die Mensch-Maschine-Interaktion noch nicht praxisgerecht gelöst. Das heißt, sie funktioniert im anwendungsnahen Laborversuch, aber noch nicht für alle Anwendungen im realen Leben. Und schließlich bedarf es ausgereifter Sicherheitskonzepte, die eine hohe Robustheit von Software und Komponenten gewährleisten. Für bestimmte Anwendungsgebiete ist der Nutzen von KI-unterstützten Exoskeletten aber bereits jetzt so hoch, dass sich Anwender mit den Nachteilen arrangieren können – etwa bei der Reha von Schlaganfallpatienten, wo es ein Exoskelett den Patienten ermöglicht, sich erstmals wieder eigenständig zu bewegen.
In der Theorie könnten zumindest passive Systeme bereits massenkompatibel sein. Wir könnten in den nächsten Jahren erleben, dass sie in Berufsbekleidungsläden, Sanitätshäusern oder sogar Sportgeschäften angeboten werden. Hier sprechen wir natürlich nicht von hochkomplexen Systemen, sondern eher von Systemen, die den Rücken unterstützen oder das Laufen erleichtern. Bedeutsam für die Marktakzeptanz ist der Preis. Voraussetzung hierfür ist, dass die Komponenten für Antriebe, Computer, Sensoren und Fertigung sinken.