FlatFish – Autonome Inspektionen in der Tiefsee
Die Unterwasserinspektion von Offshore-Industrieanlagen ist ein aufwendiges, teures und riskantes Unterfangen. Klobige, kabelgebundene Tauchfahrzeuge, sogenannte Remotely Operated Vehicles (ROVs), und spezialisierte Taucher führen bisher in waghalsigen Manövern Wartungsarbeiten im Meer durch - begleitet und unterstützt von einem oder mehreren Wartungsschiffen. Zwischen 100.000 und 300.000 Euro kostet ein Einsatz auf See pro Tag. Das DFKI entwickelt aktuell einen autonomen Roboter, der die Unterwasserinspektion von Offshore-Anlagen künftig deutlich vereinfachen könnte.
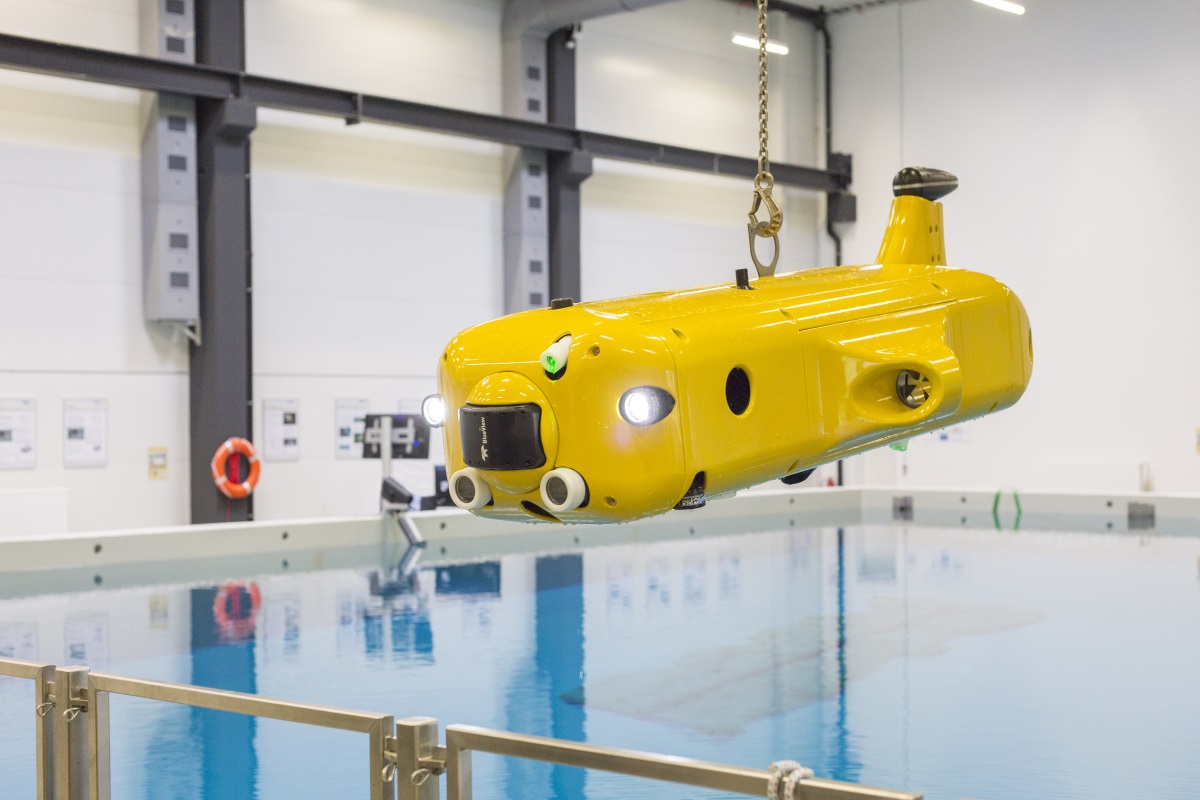
Es ist stockfinster und eiskalt, der Wasserdruck ist enorm. In den Tiefen des Meeres herrschen menschenfeindliche Bedingungen. Zwei Scheinwerferlichter erscheinen plötzlich aus der Ferne. Ein kleines, gelbes U-Boot taucht aus der Dunkelheit auf. Sein Name: FlatFish. Sein Ziel: Ein defektes Unterwasserkabel. Seine Mission: Eine autonome Unterwasserreparatur in der Tiefsee. Die Besonderheit dieses Unterwasserfahrzeugs: Kein Mensch befindet sich an Bord – und auch nicht in seiner Nähe. Der tauchende Roboter arbeitet im Ozean völlig autonom. Bis dato müssen Menschen Inspektions-U-Boote von einem Schiff aus über Wasserkabel umständlich bedienen und mit Strom versorgen. FlatFish indessen führt – wenn es nach den Vorstellungen seiner Entwicklerinnen und Entwickler geht – Unterwassermissionen künftig selbstständig und kabellos durch.
Stromversorgung und Datenaustausch unter Wasser
Entwickelt wurde FlatFish vom Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) in Kooperation mit dem Brazilian Institute of Robotics (BIR) und Shell. Das Fahrzeug ist für einen längeren Verbleib am Meeresboden konzipiert.
Über eine Docking-Station, die sich am Meeresboden befindet, führt das Mini-U-Boot automatisch Daten Up- und Downloads durch und bezieht dort seinen Strom. FlatFish kann sich in einer maximalen Entfernung von zehn Kilometern von der Docking-Station aufhalten und operieren. Mit Hilfe akustischer oder visueller Sensoren zeichnet FlatFish Daten von verschiedenen Zielobjekten auf. Technikerinnen und Techniker an Land definieren die Aufgabe und senden die Anweisungen an die Docking-Station. FlatFish fährt los und kommt nach erfolgreicher Mission zurück in seine „Garage“ am Meeresboden, wo er auf neue Aufträge wartet. Das Fahrzeug ist darauf spezialisiert, Schäden an Unterwasserkabeln, Pipelines oder Verankerungen von Bohrinseln und Windkraftanlagen zu erkennen.
Mithilfe von KI-Algorithmen autonom unterwegs

Die Programmierer von FlatFish setzten erstmals KI-Algorithmen im Bereich der Navigation ein: Das Unterwasserfahrzeug baut sich die Umgebungskarten selbstständig auf, lokalisiert sich innerhalb des Raumes und navigiert je nach Auftrag zu seinem Ziel. Mittels einer ausgeklügelten Sensorik sowie den damit verbundenen Algorithmen erkennt FlatFish auch etwaige Hindernisse, die es autonom umfahren kann und findet allein auf den geplanten Weg zurück. Damit ist auch das Monitoring vollständig automatisiert. Als Ergebnis erhalten die Betreiber eine dreidimensionale und hochauflösende Präsentation des erfassten Unterwasserobjektes – zum Beispiel einer Gas- oder Ölpipeline. Darin können Risse, Deformationen oder Überwucherungen erkannt und erfasst werden.
Die Vorteile des Systems gegenüber den bisherigen Praxis von Unterwasser-Missionen: Flatfish fährt schneller als ein kabelgebundenes Tauchfahrzeug, braucht keine teuren begleitenden Wartungsschiffe, kann ohne Chartervorlauf flexibel und kurzfristig eingesetzt werden und erhebt selbstständig die Inspektionsdaten – all das in einer Meerestiefe von bis zu 300 Metern.
Wartungsschiffe für Inspektionen nicht mehr nötig
Damit wäre eine der zentralen Schwierigkeiten der Offshore-Wartung beseitigt. Denn Fahrzeuge mit Energie zu versorgen ist seit je eine der größten Herausforderungen für die Unterwasserrobotik. Je mehr Strom die Geräte benötigen, desto abhängiger sind sie von externen Stromquellen wie Schiffen oder Unterwasserkabeln. Umso bedeutsamer ist die Tatsache, dass FlatFish seinen Akku per Docking-Station am Meeresboden autonom aufladen kann.
Das Projekt befindet sich momentan in der Prä-Kommerzialisierungsphase. Klar ist allerdings, dass nicht nur Industrie und Wirtschaft von diesem neuartigen Unterwasserroboter profitieren, sondern auch die Wissenschaft. Schließlich sind auch maritime Expeditionen in großer Meerestiefe mit FlatFish jederzeit möglich.
Fakten zur Anwendung
Bilderkennung und -verstehen
Sensorik und Kommunikation
- Autonomes Fahren und FliegenPredictive AnalyticsIntelligente AssistenzsystemeRobotikIntelligente Sensorik
DFKI Standort Bremen
Universität/Forschungsinstitution
Website
Ground Truth Robotics GmbH
Royal Dutch Shell
Brazilian Institute of Robotics (BIR)
Saipem S.p.A.