Laufroboter zur Erkundung von unbekanntem Terrain
Das Deutsche Forschungszentrum für Künstliche Intelligenz hat einen Laufroboter entwickelt, der selbstständig Hohlräume erforscht und diese auf einer Umgebungskarte visualisiert. CREX findet sich in Mondkratern ebenso zurecht wie in eingestürzten Gebäuden auf der Erde – und kann so bei der Bergung von Verletzten helfen.

Die Situation ist verwirrend und gefährlich: Eine Explosion hat einige Gebäude einer Chemiefabrik zum Einsturz gebracht und Feuer gefangen. Entweichen dort gefährliche Gase aus? Sind Arbeiter eingeschlossen? Um den Brand zu bekämpfen und mögliche Verletzte zu retten, müssten sich die Rettungsmannschaften nun in Lebensgefahr begeben.
Stattdessen schwärmen zehn sechsbeinige Schreitroboter in die Gebäude und beginnen mit ihrer Erkundung. Nach 30 Minuten kommen sie wieder heraus, jeder ausgerüstet mit einer digitalen Gefahrenkarte, auf der Hohlräume und Gaskonzentrationen genau lokalisiert sind. Grünes Licht für einen Teil der Anlage: Dort kann die Feuerwehr gefahrlos mit den Löscharbeiten und der sicheren Rettung der Verletzten beginnen.
Unterwegs auf unbekanntem Terrain
Das fiktive Szenario zeigt, wie Künstliche Intelligenz (KI) dazu beitragen kann, Menschen in gefährlichen Umgebungen bei der Arbeit zu unterstützen – und Leben zu retten. Noch ist der Laufroboter CREX ein Demonstrator des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) GmbH. Die Technologien dafür haben die Bremer Forscherinnen und Forscher in verwinkelten Höhlensystemen auf Teneriffa erfolgreich erprobt. „Für solche Robotereinsätze braucht es schon einen sehr hohen Grad an Künstlicher Intelligenz“, sagt Steffen Planthaber, der das Projekt von 2014 bis 2017 leitete. „Konkret nutzen wir hier die autonome, dreidimensionale Wegplanung mit Hilfe der Search-Based Planning Library (SBPL) und Entscheidungsfindung in unbekannten Umgebungen mittels „Rigid Body Simulation“ und Bewertung der damit simulierten Verhaltensvarianten.“
Ursprünglich entwickelten Planthaber und sein Team robotische Systeme für Raumfahrtmissionen – etwa um Höhlen auf dem Mond für bemannte Mondstationen zu erforschen. Das Anwendungsfeld wurde ausgeweitet, da sich die Anforderungen an intelligente Roboter auf Himmelskörpern und in eingestürzten Gebäuden ähnelten, erklärt Steffen Planthaber: „Die Roboter bewegen sich in einer unbekannten Umgebung, müssen den besten Weg erkennen, dabei Hindernissen ausweichen, den Weg zurück finden – und das teilautonom.“
Selbstständiger Simulant
Mit dem Begriff Teilautonomie umschreibt KI-Forscher Planthaber das Zusammenspiel aus menschlichen Befehlen und selbstständigen Entscheidungen einer Maschine: „Wir sagen dem Roboter zum Beispiel: Geh in diese Richtung hinein, schau dich um und komm in einer halben Stunde wieder raus.“ Was in der Zwischenzeit passiert, können die Wissenschaftler in der Bremer Kontrollstation weder in Echtzeit überwachen noch beeinflussen. Denn eine Satellitenverbindung gibt es an den entlegenen oder unzugänglichen Einsatzorten von CREX meist nicht.
Vor Ort ist der 27 Kilogramm schwere Laufroboter auf sich alleine gestellt, kann aber auf eine Expeditionsausrüstung vertrauen: Ein 3D-Laserscanner tastet die komplette Umgebung ab. Vor jedem Hindernis helfen Planungsalgorithmen bei der Entscheidung: Kann das Hindernis überwunden werden? In besonders schwierigen Situationen, wenn etwa eine tiefe Rinne den Weg kreuzt, startet der Roboter zunächst eine Simulation. „Erst wenn er das Hindernis in der Theorie überwinden kann, führt er die Bewegung auch tatsächlich aus“, erklärt Steffen Planthaber.
Auftrag ausgeführt
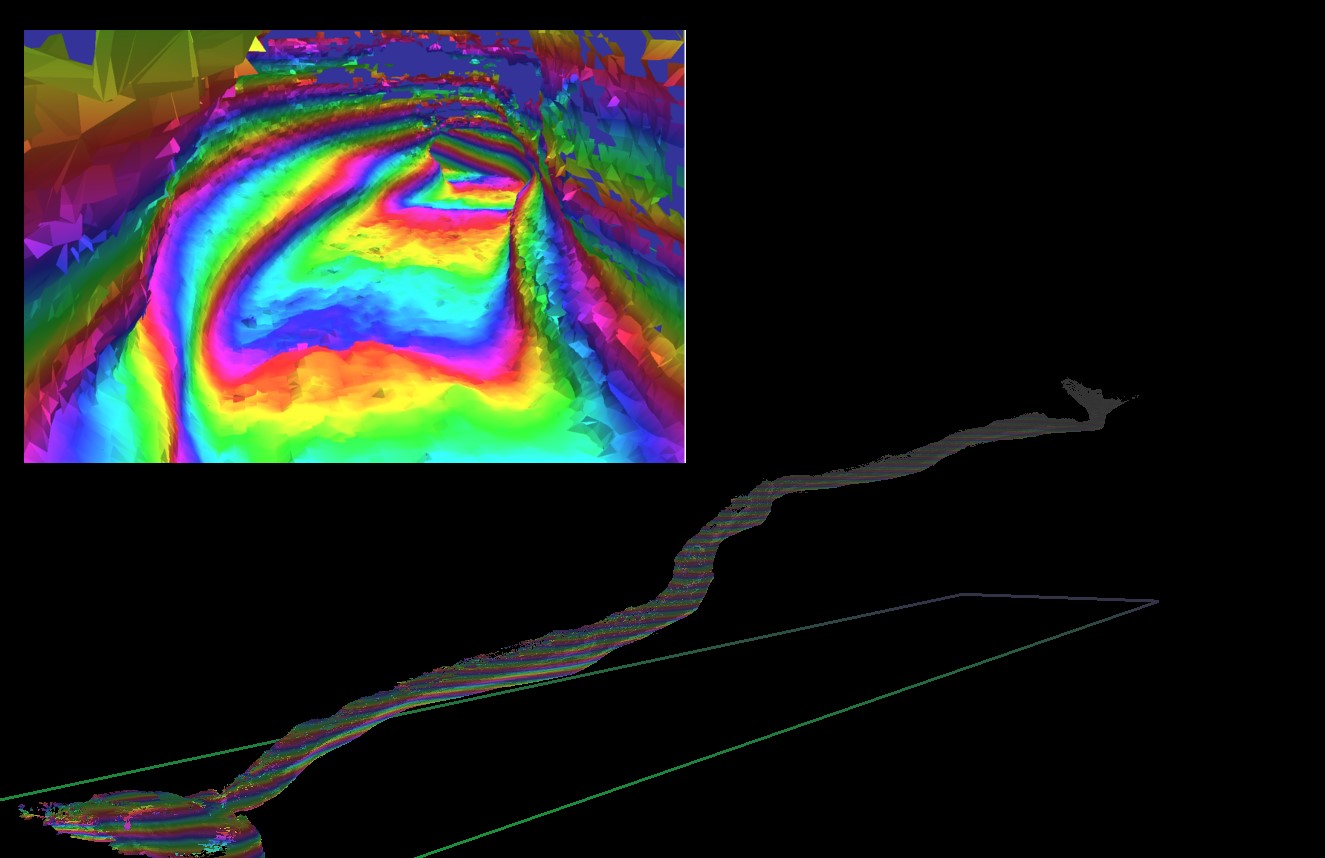
Wenn CREX von seinem Einsatz zurückkommt, sendet er bei intakter Funkverbindung die mitgebrachten Daten unverzüglich an die Kontrollstation. Dort erscheint eine dreidimensionale virtuelle Umgebungskarte – im Szenario der eingestürzten Fabrikgebäude angereichert mit der über einen Sensor aufgezeichneten Gaskonzentration. „Künstliche Intelligenz brauchen wir immer dann, wenn Systeme selbst einen Plan fassen und diesen dann auch verfolgen sollen“, fasst DFKI-Wissenschaftler Planthaber zusammen.
Noch ist der Hightech-Laufroboter als Forschungsprototyp und Einzelstück im Einsatz. Seine Erfinder bringen ihm nun bei, schneller und energieeffizienter zu laufen und steile Umgebungen noch besser zu meistern. Wenn er das gelernt hat, soll CREX in Serie gehen und an den gefährlichsten Orten der Erde den Menschen unterstützen.
Fakten zur Anwendung
- Intelligente Assistenzsysteme
DFKI Standort Bremen
Universität/Forschungsinstitution
Website