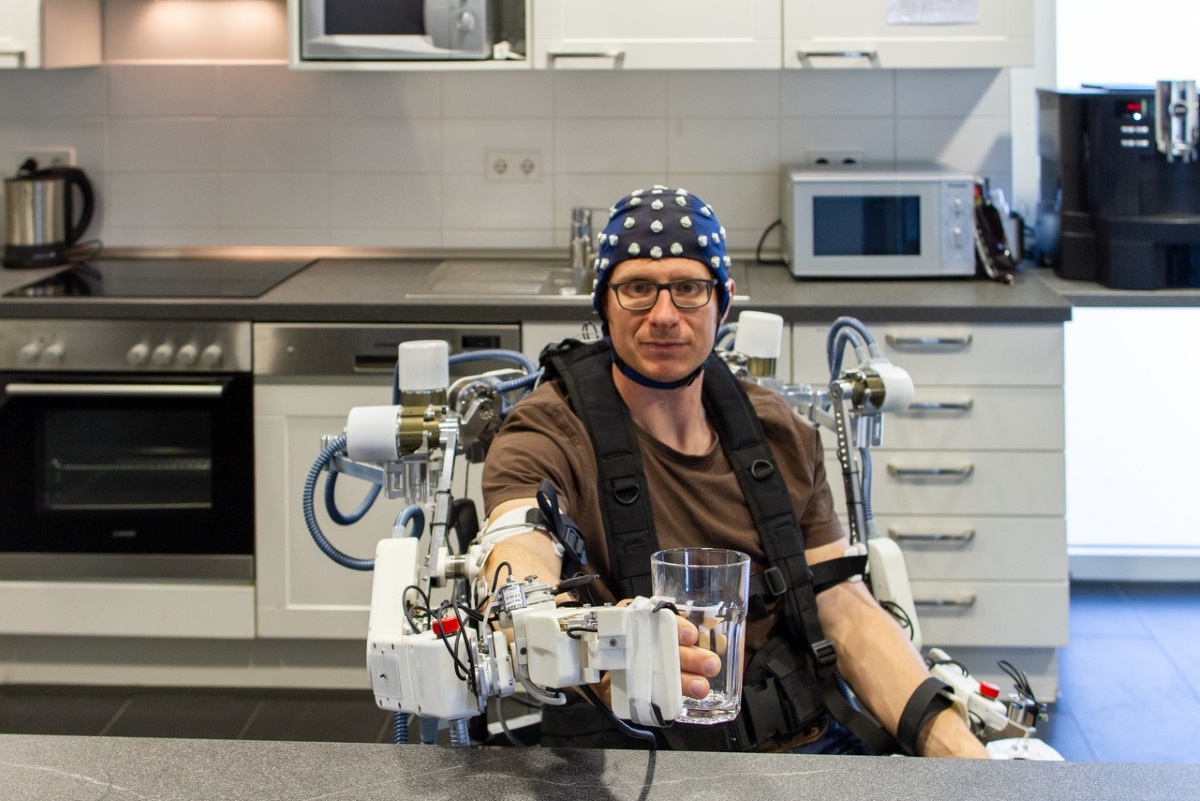
Wearable exoskeleton for stroke patients
The interaction between mind and body does not always work perfectly - for example, due to neurological damage caused by an illness or accident. What if technological enhancements could help those affected to activate non-functional limbs? To turn this idea into reality, scientists at DFKI in Bremen have created an AI-supported exoskeleton.
For decades, science fiction authors have been inventing technical extensions of the body that increase human strength. Man and machine are supposed to merge into a perfect unity, as in the case of the US comic hero Iron Man and his high-tech armor Mark. Such technical fantasies were previously difficult to grasp in the real world. Today it is clear that with the help of Artificial Intelligence, partial and full-body exoskeletons can open up new possibilities for people with physical disabilities. Rehabilitation robotics is the name of the discipline that deals with this.
In recent years, the Robotics Innovation Center of the German Research Center for Artificial Intelligence (DFKI) in Bremen has developed a mobile whole-body exoskeleton for patients with neurological diseases in its Recupera REHA project. This offers them extended and innovative therapeutic options. Individual drive systems in small white boxes, so-called actuators, are attached to a metal skeleton. Alternatively, these individual modules are assembled into gripping arms and can be attached to the wheelchair to support the mobility of the arms. Depending on the patient's handicap, they are supported when grasping or walking and can use it independently, even without the support of a doctor or physiotherapist.
The technical challenges for this form of robot-supported rehabilitation are complex: In order to be able to capture the range of motion of the human body to a large extent, new methods in control engineering and material production must be developed. The scientists at DFKI are pursuing a mechatronic approach including online evaluation of electroencephalography and electromyography (EEG and EMG) signals - i.e. the signal transmission from the brain to the muscles. In this way, the computer system can assess the physical condition of the patients at any time. EMG signals enable the estimation of residual activity, i.e. how much muscle power is still available to the patient. Based on this real-time analysis, the support force can be adjusted to the need. By compensating for these forces up to the weight of the arm itself, the exoskeleton can enable the patient to move the arm independently again, even with only minimal muscle power. If the patient no longer has any residual muscle activity, the EEG data can be used instead of the EMG data to detect and execute movement. The so-called embedded brain reading through biosignal integration thus enables optimal adaptation to individual needs. This requires 30 electric drives; 72 sensors record the range of motion and the forces of the human body.
Interaction of electrical engineering and AI

In close cooperation with rehaworks GmbH in Olsberg, DFKI developed application concepts based on classical therapy methods such as movement training or occupational therapy. They can be used at home, for example, by means of virtual reality via 3D glasses.
The development of safe robotic systems poses great challenges for science, including the exoskeleton. The individual joint types must be carefully selected, and the components must be designed in interaction with the human limbs. In addition, the system must evaluate motion and sensorimotor data live in order to analyze user behavior and adapt the control system to the individual patient.
However, the exoskeleton also learns by creating activity models of healthy volunteers, which are used for comparison. DFKI uses the open software pySPACE to analyze EEG and EMG data. In order to achieve the autonomy of the patients required for rehabilitation, all calculations must take place within the exoskeletal system structure. Integrated circuits (FPGAs) should provide the required power in a space- and energy-saving manner.
From laboratory application to practice
Exoskeletons have already made the leap from pure laboratory applications to practical use, says Elsa Kirchner, senior staff member at the Robotics Innovation Center of DFKI: "In the rehabilitation and industrial environment, there are now several manufacturers who offer models for different areas of application. This means that at present, important findings from practical experience can flow into improvements of the systems". However, there is still a need for research, says Elsa Kirchner (see interview). The goal is clear: to give people with physical disabilities back lost opportunities for movement and make life easier.
Application facts
Human-Computer Interaction and Assistance Systems
- Miscellaneous
DFKI Standort Bremen
University/Research Institution
Website
"Passive Exoskelette könnten bereits massenkompatibel sein"

Dr. Elsa Kirchner, Teamleiterin am Robotics Innovation Center des DFKI und Mitglied der Plattform Lernende Systeme
Grundsätzlich haben Exoskelett-Systeme den Sprung von Laboranwendungen in die Praxis geschafft. Generell besteht aber noch großer Forschungsbedarf. So stehen technische Durchbrüche in der Miniaturisierung der Anwendungen sowie einer gesteigerten Rechenpower relativ zum Energieverbrauch noch aus. Weitere Forschungsfelder sind die Integration von Biosignalen und KI-basierter autonomer Kontexterkennung in die Regelungstechnik und die automatisierte High-Level Steuerung. Die KI-basierte Kontexterkennung würde Fragen vorhersagen, beantworten oder evaluieren, wie: Was macht der Träger gerade? Wo? Warum? Was sind seine Vorlieben? Zudem gilt es, geeignete Anwendungen für Exoskelette zu identifizieren und diese durch eine Bedarfsanalyse praxistauglich zu gestalten.
Aus meiner Sicht stimmt das Kosten-Nutzen-Verhältnis noch nicht – und das ist nicht nur monetär gemeint. Durch das Tragen eines Exoskeletts, etwa zur Kraftunterstützung im Rücken, erkaufe ich mir aktuell häufig starke Einschränkungen in anderen Bereichen. Zudem ist die Mensch-Maschine-Interaktion noch nicht praxisgerecht gelöst. Das heißt, sie funktioniert im anwendungsnahen Laborversuch, aber noch nicht für alle Anwendungen im realen Leben. Und schließlich bedarf es ausgereifter Sicherheitskonzepte, die eine hohe Robustheit von Software und Komponenten gewährleisten. Für bestimmte Anwendungsgebiete ist der Nutzen von KI-unterstützten Exoskeletten aber bereits jetzt so hoch, dass sich Anwender mit den Nachteilen arrangieren können – etwa bei der Reha von Schlaganfallpatienten, wo es ein Exoskelett den Patienten ermöglicht, sich erstmals wieder eigenständig zu bewegen.
In der Theorie könnten zumindest passive Systeme bereits massenkompatibel sein. Wir könnten in den nächsten Jahren erleben, dass sie in Berufsbekleidungsläden, Sanitätshäusern oder sogar Sportgeschäften angeboten werden. Hier sprechen wir natürlich nicht von hochkomplexen Systemen, sondern eher von Systemen, die den Rücken unterstützen oder das Laufen erleichtern. Bedeutsam für die Marktakzeptanz ist der Preis. Voraussetzung hierfür ist, dass die Komponenten für Antriebe, Computer, Sensoren und Fertigung sinken.