Walking robot for exploring unknown terrain
The German Research Center for Artificial Intelligence has developed a walking robot that independently explores cavities and visualizes them on a map of the environment. CREX can find its way around moon craters as well as collapsed buildings on Earth - and can thus help to rescue injured people.

The situation is confusing and dangerous: an explosion has brought down some buildings of a chemical factory and caught fire. Are there any dangerous gases escaping? Are workers trapped? In order to fight the fire and rescue possible injured people, the rescue teams would now have to put their lives in danger.
Instead, ten six-legged walking robots swarm into the buildings and begin their exploration. After 30 minutes they come out again, each equipped with a digital hazard map on which cavities and gas concentrations are precisely located. Green light for part of the facility: There, the fire brigade can safely begin fire-fighting operations and safely rescue the injured.
On the road in unknown terrain
The fictional scenario shows how Artificial Intelligence (AI) can help to support people in dangerous environments at work - and save lives. The walking robot CREX is still a demonstrator of the German Research Center for Artificial Intelligence (DFKI) GmbH. The Bremen researchers have successfully tested the technologies for this in winding cave systems on Tenerife. "Robot missions of this kind already require a very high degree of artificial intelligence," says Steffen Planthaber, who headed the project from 2014 to 2017. "Specifically, we use autonomous, three-dimensional path planning with the help of the Search-Based Planning Library (SBPL) and decision-making in unknown environments by means of "rigid body simulation" and evaluation of the behavior variants simulated with it".
Originally, Planthaber and his team developed robotic systems for space missions - for example, to explore caves on the moon for manned lunar stations. The field of application was expanded because the requirements for intelligent robots on celestial bodies and in collapsed buildings were similar, explains Steffen Planthaber: "The robots move in an unknown environment, have to recognize the best path, avoid obstacles, find their way back - and they do so semi-autonomously.
Independent simulator
AI researcher Planthaber uses the term partial autonomy to describe the interplay between human commands and independent decisions made by a machine: "For example, we tell the robot: Go in this direction, look around and come out in half an hour. What happens in the meantime, the scientists at the Bremen control station can neither monitor nor influence in real time. This is because a satellite link is usually not available at CREX's remote or inaccessible locations.
On site, the 27 kilogram walking robot is on its own, but can rely on expedition equipment: A 3D laser scanner scans the entire environment. In front of each obstacle, planning algorithms help to decide: Can the obstacle be overcome? In particularly difficult situations, such as when a deep gutter crosses the path, the robot first starts a simulation. "Only when it can overcome the obstacle in theory does it actually perform the movement," explains Steffen Planthaber.
Order executed
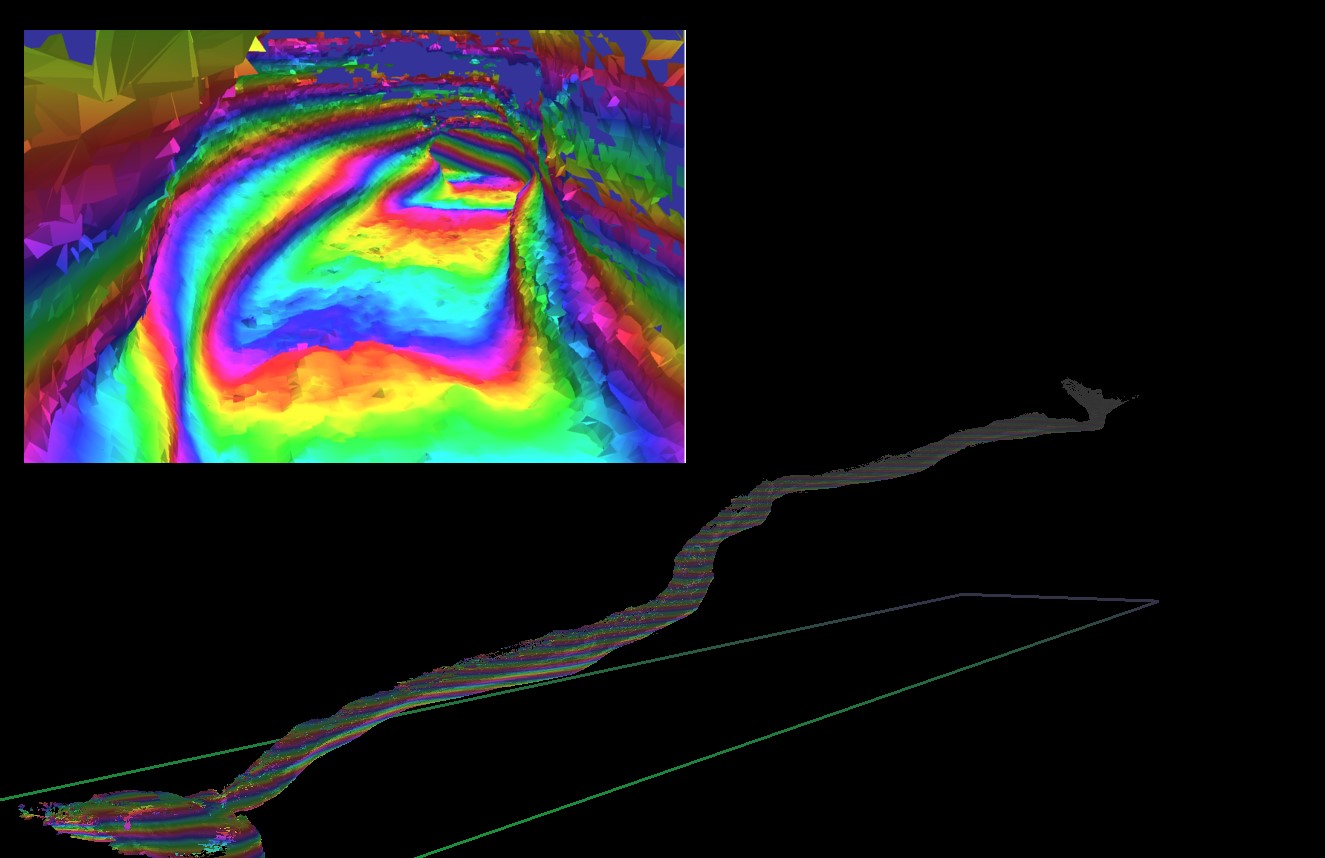
When CREX comes back from his mission, he immediately sends the data he brought along to the control station, provided the radio connection is intact. There a three-dimensional virtual map of the surroundings appears - in the scenario of collapsed factory buildings, enriched with the gas concentration recorded by a sensor. "We always need artificial intelligence if systems themselves are to draw up a plan and then follow it," summarizes DFKI scientist Planthaber.
The high-tech walking robot is still in use as a research prototype and unique piece. Its inventors are now teaching it to run faster and more energy-efficiently and to master steep environments even better. Once he has learned this, CREX is to go into series production and support people in the most dangerous places on earth.
Application facts
- Intelligent Assistance Systems
DFKI Standort Bremen
University/Research Institution
Website